













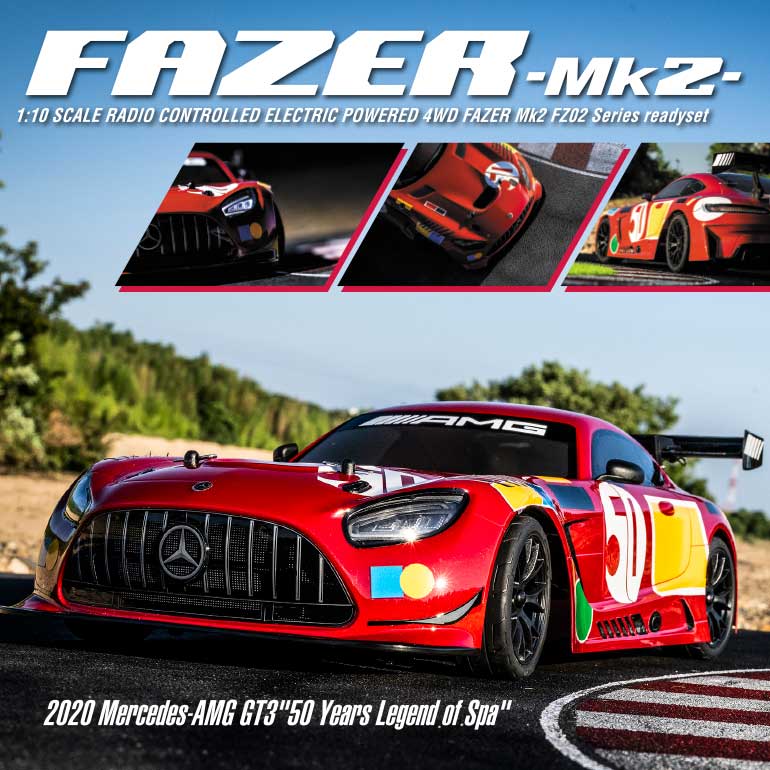
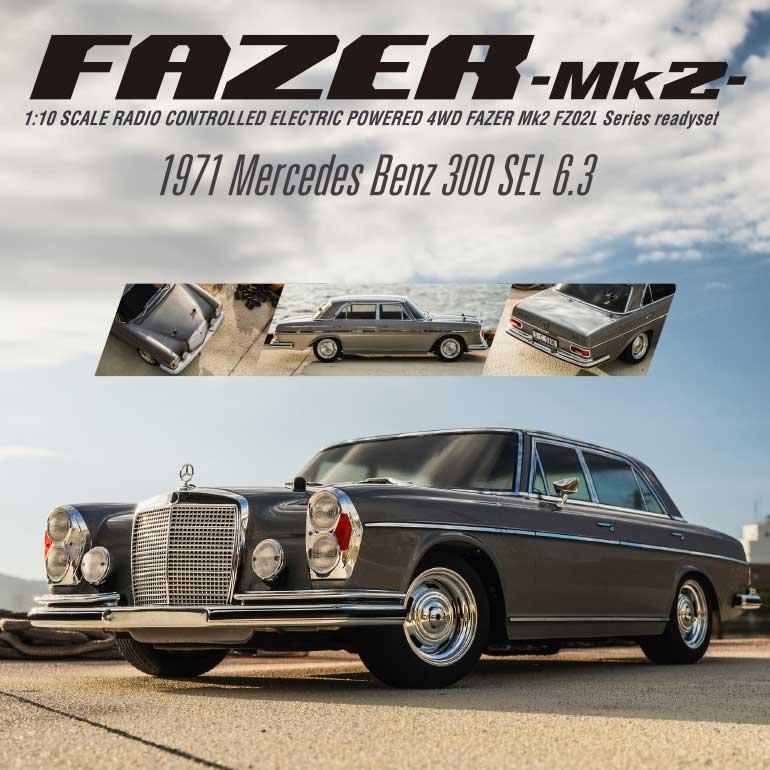






FEATURED PRODUCTS






NEW PRODUCTS

KYOSHO RC BLOG

MINI-Z NEWS



Recommend MINI-Z

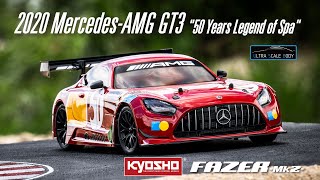
LATEST KYOSHO RC VIDEOS






Mini-Zサービスステーションで
景品をGET !!

サービスステーション加盟店はこちら
京商ミニッツのすべて2024
- 「京商ミニッツシリーズ」の最新情報を紹介する2024年版ムックが登場!

モノ・マガジン
- モノ・マガジン特集号にミニッツが掲載されました!
2023 RC CATALOG
- 陸海空のラジオコントロールモデル満載
(サッとご覧いただける無料の電子書籍です)

東宝怪獣コレクション



生産終了アイテム情報
ショップ&サーキットトピックス
- エンジンカーやハングオンレーサー が走行可能なサーキットの紹介

WHAT'S NEW
- 2024/04/19
- 2024/04/19
- 2024/04/17
- 2024/04/15
- 2024/04/04
- 2024/04/03
重要なお知らせ
- 2024/04/15
- 2024/04/09
- 2024/02/29
- 2024/02/05





